
Control System Laboratory
I am a believer in the value of performing experiments, and I always try balancing theory and practice in the art of doing good and proper research. My objective and role as a professor and a researcher are preparing students to contribute as a researcher in industry or academia. However, that is not easy, but it is fun!
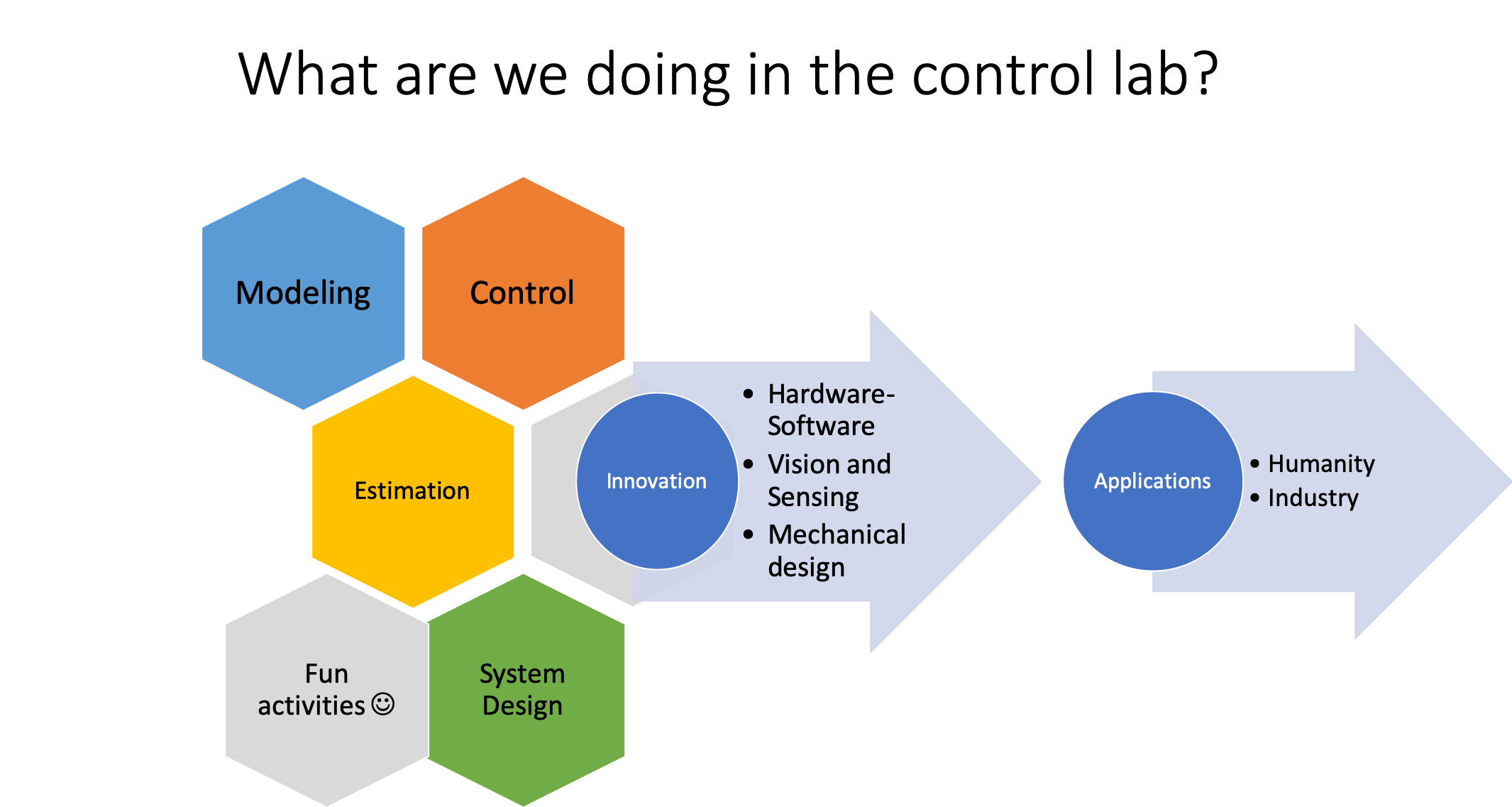
Research Activities in our Lab
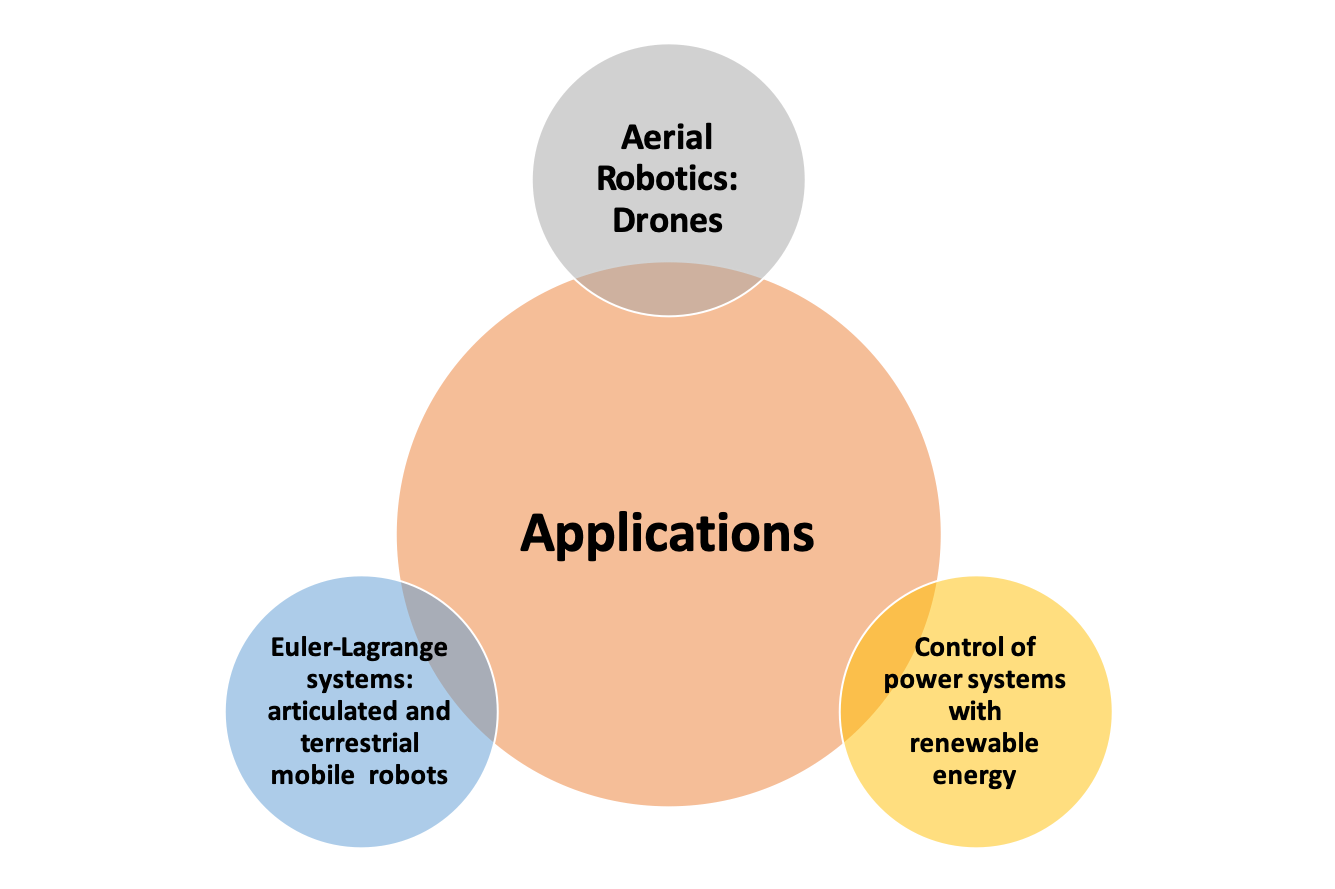
Applications
-
Links: Evolution of the experimental platforms developed by my group over the past years
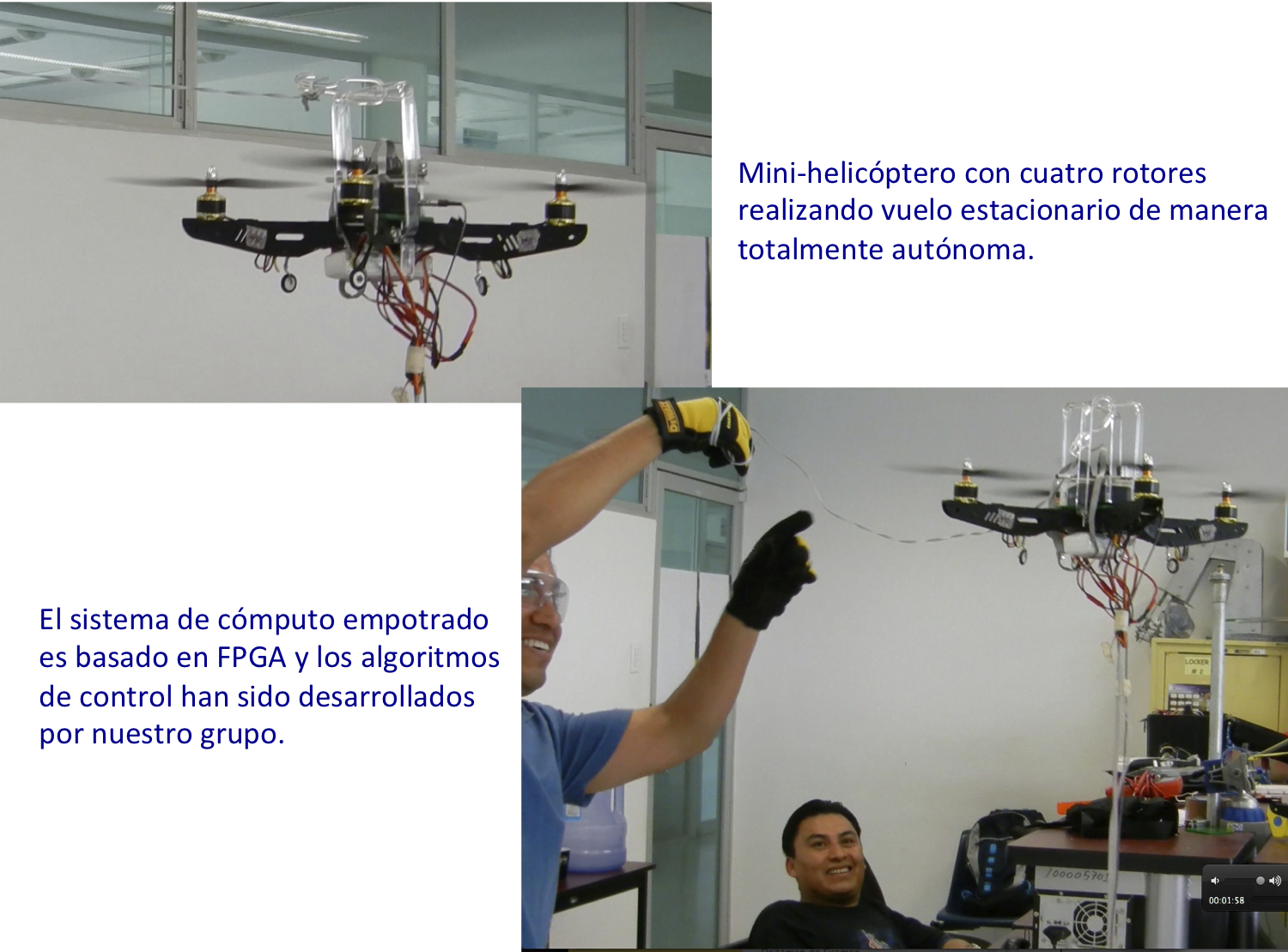
• UAV Four-rotor plaform evolution (see the Video)• Attitude control and estimation under own autopilot (FPGA based)

Here is my first group of students and me (from left) working with drones around 2012. Thanks for starting this adventure...
Developed prototypes
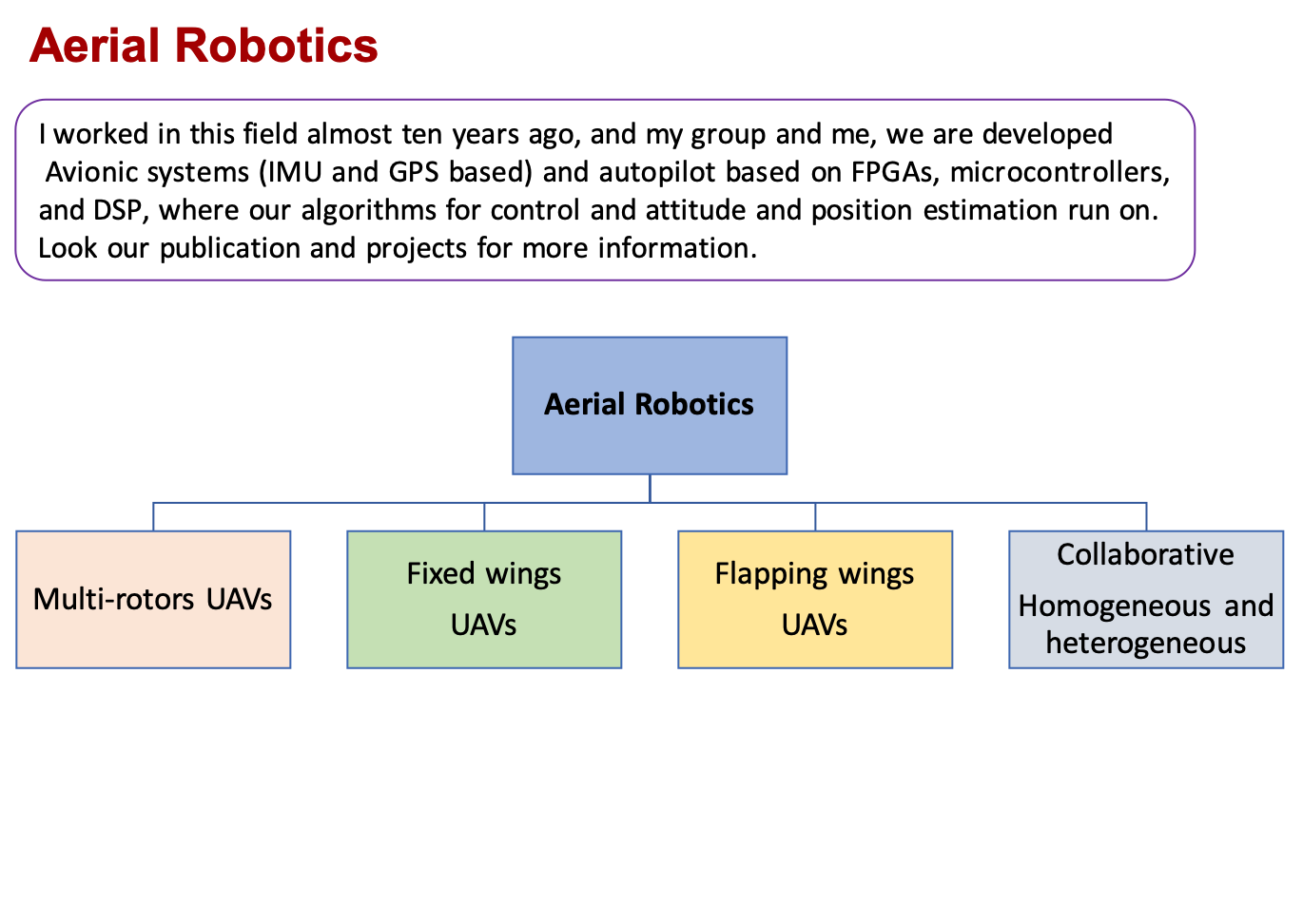
We have been working in the development of AHRS (Attitude Heading and Reference System) INS-GPS systems and autopilots for aerial robots. Here, some examples...
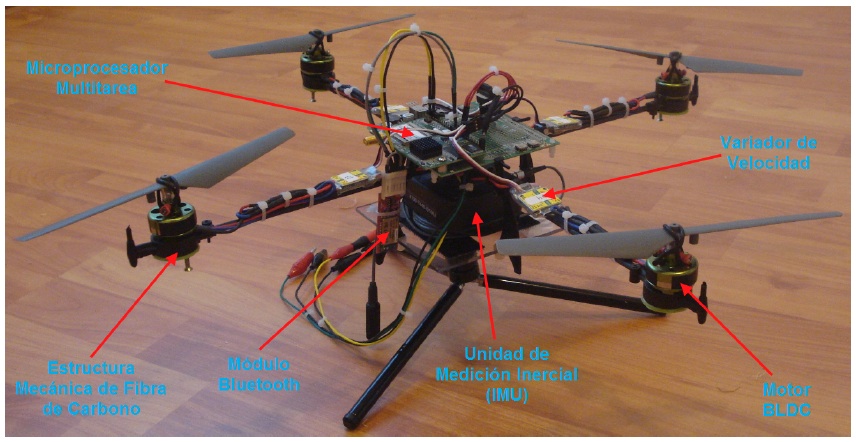
Version I (Student: Edgar Muñoz ) .
Version II (Student: Juan Téllez Guzmán)
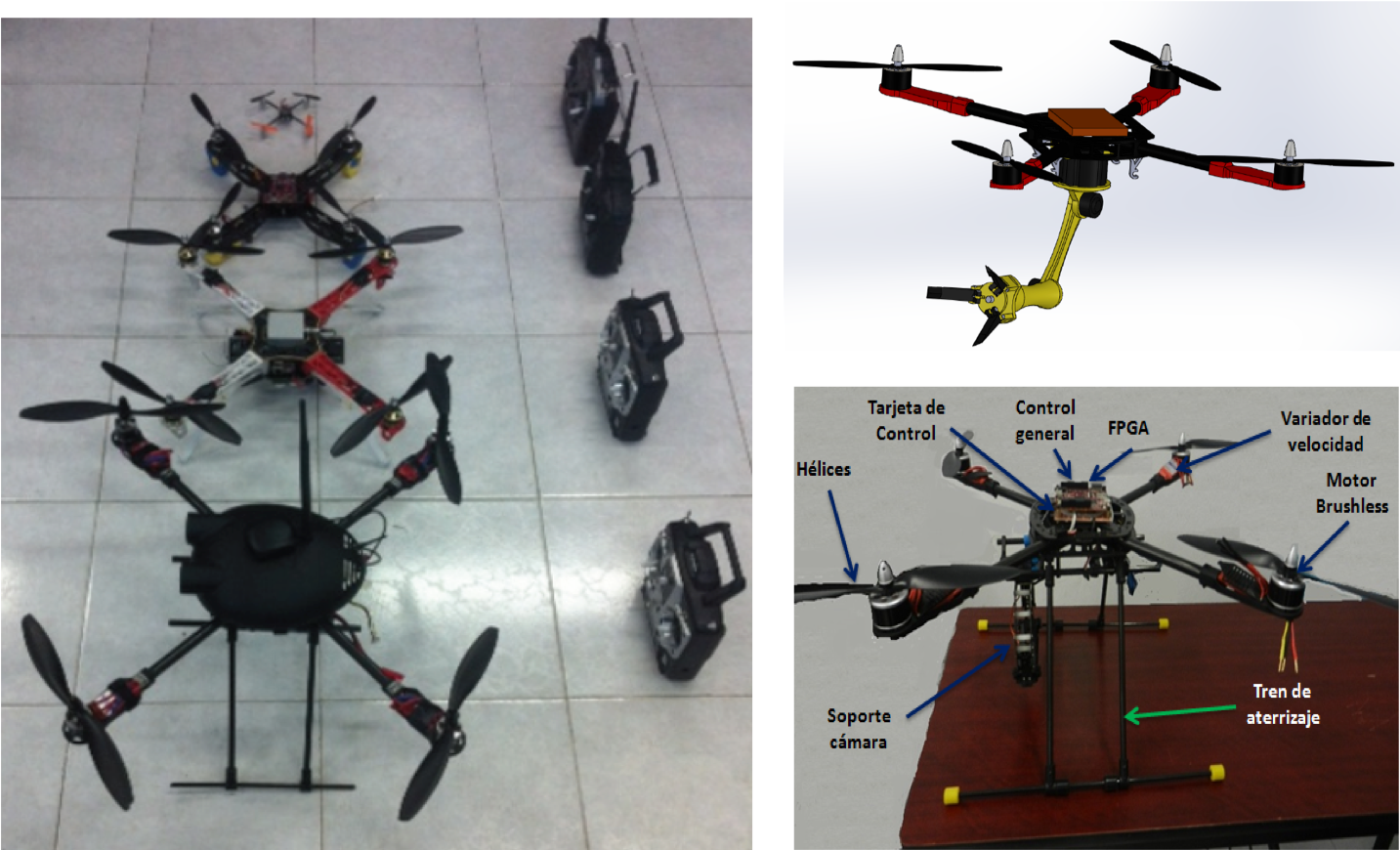
Experimental platforms developed by my group.
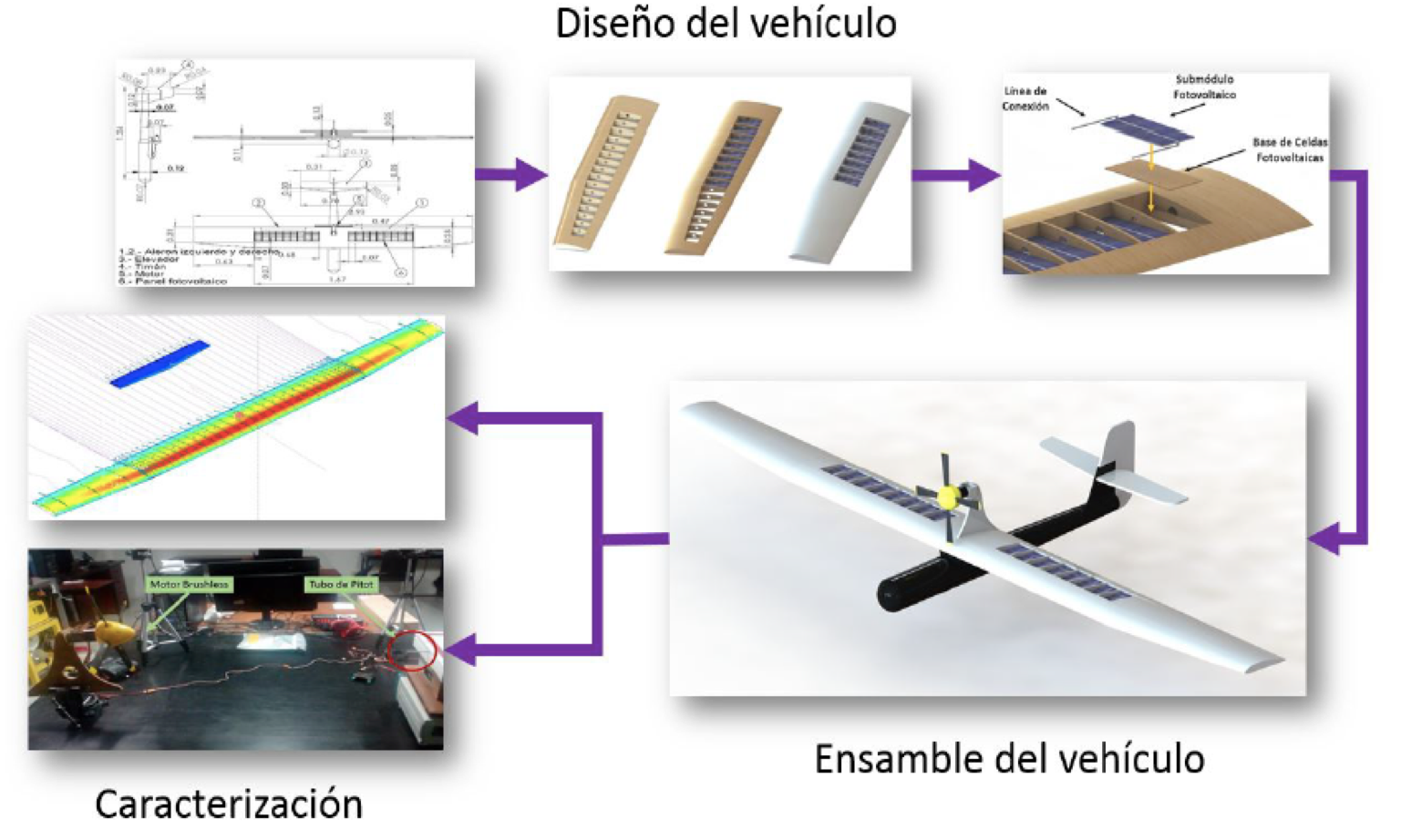
Solar Fixed wing UAV.

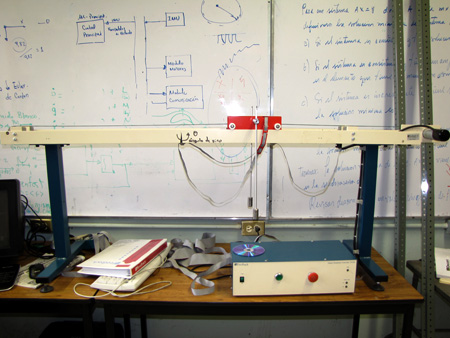
PVTOL Vehicle (Planar Vertical Take-Off and Landing) for implementation of event-triggered control algorithms over networks (NCS: Networked Control Systems)
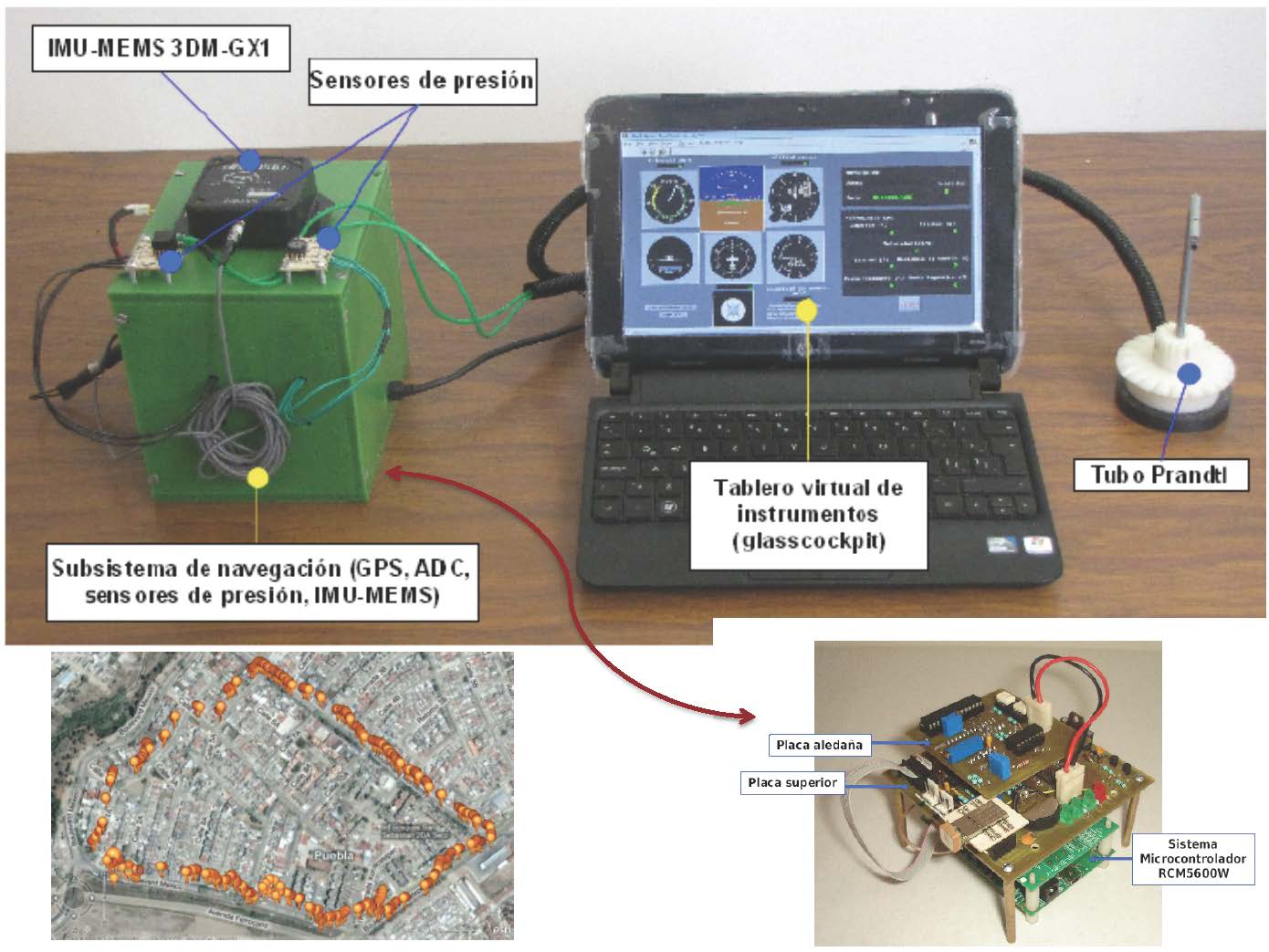
INS-GPS platform (Data fusion using Kalman Filter and Nonlinear observers)
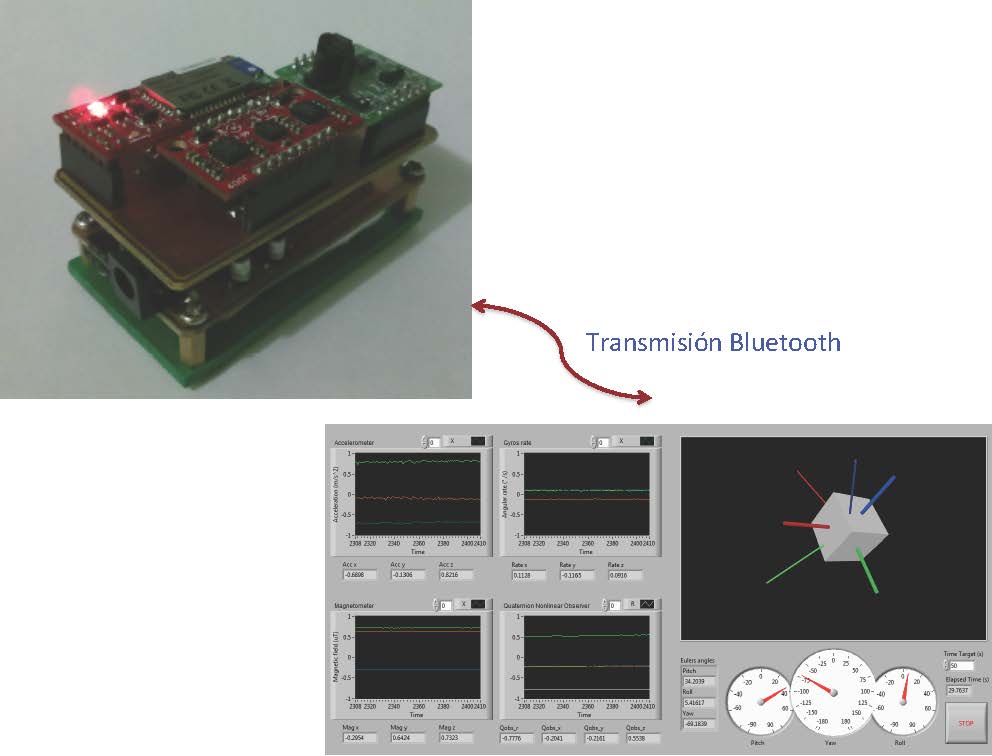
AHRS strapdown.
Experimental results

Four-rotor in fligh.

Vuelo del Mini helicóptero con cuatro rotores con sistema de visión

Vista tomada con cámara de a bordo del Mini helicóptero con cuatro rotores (Popocatepetl)

Vista tomada con cámara de a bordo del Mini helicóptero con cuatro rotores (Ciudad Universitaria)
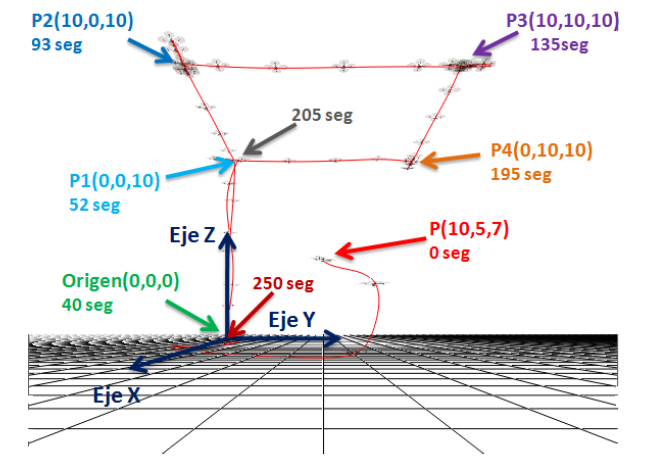
Seguimiento de puntos mediante control automático
Equipos dedicados a la enseñanza e investigación
Existe una colaboración muy estrecha con el Laboratorio de Sistemas Dinámicos Controlables de la Facultad de Ciencias Físico Matemáticas donde se tienen algunos sistemas dedicados a la enseñanza e investigación. Está colaboración se basa en la co-dirección de estudiantes de maestría y doctorado del área de Física Aplicada.

The Twin Rotor MIMO (Multiple Input, Multiple Output) System
Péndulo invertido sobre una base móvil

Vehículo aéreo de ala fija usada la cual está siendo instrumentada para misiones de monitoreo

Mechatronic Control Kit
BUAP-FCE | Edificio 182, Ciudad Universitaria: Av. San Claudio y 18 Sur, Col. Jardines de San Manuel, Puebla, México. | Teléfono (222) 229 55 00 Ext. 7400
Publicado en Enero de 2010 | Hecho en México | Créditos